Accueil19473 PROGRAMMESPROTECTIONSDumpeurs9432 commentaires LiensContactDonationsFORUM

 2257
2257 













NOTICE TEXTE n° 1 (24.29 Ko)

| Session end : 12h00m00s | Hide picture Sexe : OFF |  |  |  |  | Donations 2024 : 500.41 € |
2257 
NOTICE / MANUAL
PDF (3)JPG (3)TXT (1)





NOTICE TEXTE n° 1 (24.29 Ko) 
-----------------------------------------------------
| To load Cassette press CTRL and small ENTER keys. |
| To load Disk type RUN "T |
| Follow LENSLOK procedure for security code entry. |
-----------------------------------------------------
3D real-world display:
Features include landing pads, buildings, trees, transmission pylons,
mountains, enemy tanks, field guns and helicopters. Ground texture is visible
when flying below 500 feet to enhance the sensation of speed. It is possible,
with practice, to fly between trees and mountain peaks.
MENU OPTIONS
MISSION 1 - FLYING TRAINING - used for helicopter familiarisation & developing
ground attack skills. Enemy ground forces will not return fire.
MISSION 2 - COMBAT - a short mission to destroy invading ground forces and
return to base.
MISSION 3 - COMBAT - Surrounded totally by enemy territory, your task is to
liberate the entire map from enemy occupation. Each hostile sector becomes
allied when enemy forces destroyed.
MISSION 4 - COMBAT - A strategic battle for occupation of the entire map. Your
task is to support allied ground forces in their battle along the front line.
2 DAY OR NIGHT - Daytime: blue or overcast sky, green ground
Nightime: no horizon, computer-enhanced infrared imaging. (Pilot's Night Vision
System.)
3 CLEAR OR CLOUDY - option for overcast sky with selectable cloudbase for
instrument flying.
4 CLOUDBASE - selectable from 50 ft to 1000 ft.
5 CROSSWINDS & TURBULENCE - for the experienced pilot! Variable crosswind &
turbulence effects.
6 PILOT RATING - TRAINEE
SQUADRON
INSTRUCTOR
ACE
The pilot rating is equivalent to difficulty level and varies potency of enemy.
With each increase in pilot rating, the enemy's accuracy doubles!
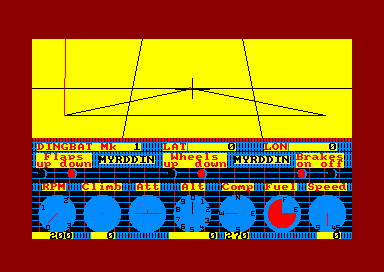
INSTRUMENT PANEL LAYOUT
-----------------------
Bar scales. from left:
Collective lever position indicator - C
Engine Torque - TO 0 to 130%
(power demanded from engines)
Turbine & Rotor RPM - 0 to 120%
Throttle position indicator - THR
Engine temperature , °C
Fuel
Score
WEAPONS:
1200 rounds 30mm ammunition, 750 rounds/min, 38 unguided rockets (19 each
side), 8 Hellfire missiles - laser guided, auto-tracking
Failure status lights: engines, weapons, nav. computer, TADS
INSTRUMENTS: (left to right)
TADS
Target Acquisition & Designation System - Used to identify and track tanks,
field guns and helicopters.
Red = hostile, blue = friendly. Includes range readout in feet when target is
less than 10,000 feet away.
VDU - Visual Display Unit
Speed, in knots (cyan = forwards, white = backwards)
Altitude, feet
VSI - Vertical Speed, ft/sec (arrow UP = climb, arrow DOWN = descent)
TIME - Time to reach target, in hours and minutes (hashed it greater than 4
hrs, zero if less than 1 minute)
RANGE - autoranging navigation computer
Within 0.1 mls: resolution in feet
Within 4.9 mls: resolution in 0.1 mls
Over 5 mls: resolution 1 mile.
ARTIFICIAL HORIZON
Roll attitude
Pitch indicator - nose up/down attitude
Sideslip indicator - sideways "drift"
DOPPLER NAVIGATION/COMPASS - (rightmost instrument)
Readout of Heading, Bearing & Track.
Heading: direction in which the helicopter is pointing.
Track: flight path direction.
Bearing: heading required to point at objective.
Note: a helicopter can be pointing in one direction (Heading) but moving in a
different direction (Track) e.g. sideways! Match the heading to the target
bearing to intercept target. The flashing cross indicates relative bearing of
target.
Four modes:
B: Beacon navigation (8 beacons)
H: Landing Pad guidance (4 pads per sector)
T: Ground target tracking (6 targets per sector)
Lightning symbol: enemy helicopter interception
Flashing symbol warns of approaching enemy helicopter.
CONTROLS
--------
THROTTLE - key W to open throttle
key S to close throttle
Controls engine/turbine rpm. Normally set to fully open unless practising
engine-off landings. Assisted in flight by computerised autothrottle control.
COLLECTIVE LEVER - key Q increases lift
key A decreases lift
This is basically a vertical lift control used for take-off to the hover, and
forward thrust control in straight & level flight.
CYCLIC CONTROL
joystick forward (cursor key up) tilts nose down
joystick back (cursor key down) tilts nose up
joystick right (cursor key right) to roll right
joystick left (cursor key left) to roll left
RUDDER - key X to yaw right
key Z to yaw left
DOPPLER MODE
Key C selects between beacon mode (B), landing pad mode (H), ground attack mode
(T) or air-to-air mode (lightning symbol) on DOPPLER/COMPASS instrument.
key N selects "next objective" in each mode:
8 beacons (0 to 7)
4 landing pads per sector (0 to 3)
8 enemy targets per sector (0 to 7)
1 enemy helicopter
Press ESC to abort mission and retum to the menu.
WEAPON SYSTEMS & TARGET ATTACK
When in ground attack or air-to-air mode, the weapons systems are activated.
The helicopter must be airborne to fire its weapons. Select between gun,
rockets or missiles using key P. The gun & rockets are manual tracking only
i.e. the target must be in the sights when the weapon is launched or for the
TADS to operate. The missile system locks on to any hostile target passing
through the sights & lock-on is depicted by a Solid Square. Tracking is
automatic if the target remains on screen.
GUN - vert/horiz sights - range 2000 ft
ROCKET - diagonal sights - range 4000 ft
MISSILES - square sights range 3.1mls
FIRE BUTTON - SPACE BAR or fire button on joystick.
The time for a weapon to reach a target will depend on how far the target is
away. It is possible to locate and destroy enemy targets in both map mode and
in cloud,
During combat, enemy fire is indicated by a flashing border. The panel will
flash if your helicopter is hit. The sky will flash when ground forces destroy
each other (Mission 4 only). Damage to helicopter systems is indicated on the
failure status panel and structural damage is shown by the Doppler helicopter
symbol turning red. A third structural hit is fatal! The chances of being hit
by the enemy are decreased by swerving during the attack. You have a total of 3
helicopters per mission. Study the mission report for crash evaluation and
performance report.
If an enemy helicopter is approaching, a warning symbol will be flashed on the
Doppler instrument if you are not in air-to-air combat mode. You are advised to
select air-to-air combat mode and destroy the enemy helicopter before he gets
too close!
Scoring Scheme
--------------
Target
Weapon
Used Field gun Tank Helicopter
Gun 20 - 100
Rockets 10 20 50
Missiles 5 10 25
Points Scored
It is not possible to destroy a tank with the chain gun. Destruction of allied
forces will result in total loss of score. Although it is much easier to hit a
target with a missile, fewer points will be scored. The enemy will begin to
fire back at a range between 4000 and 5000 feet, making it much more dangerous
to use guns (range 2000 ft!) but the points scored will be higher.
MAP
Use key M to select map or to return to normal display. Your helicopter is
shown by the flashing symbol with a tail. Enemy helicopters are shown without a
tailplane. Beacons 0 to 7 are used for navigation purposes.
By selecting MAP mode when sitting on any allied pad, the helicopter may be
moved to another allied sector by using cursor keys or joystick .
This feature eliminates the need for lengthy straight and level flight to visit
each sector.
When training (Mission 1), all sectors are allied and any landing pad may be
used for refuelling, rearming or repairs. All sectors contain enemy tanks and
field guns for target practice.
In combat missions, territory is distinguished by blue (Allied) sectors and red
(Hostile) sectors. A flashing blue sector indicates the presence of enemy
forces in allied territory. Likewise, a flashing red sector indicates the
presence of allied forces in hostile territory. You will be captured by the
enemy if you touchdown in hostile territory.
The destruction of all enemy forces in a hostile sector will result in the
sector becoming allied. Likewise, if all allied forces in a sector are
destroyed, the sector becomes hostile.
The map is designed to "wrap around" at the edges i.e. when flying off the map,
the helicopter will reappear at the opposite edge.
PILOT'S NOTES
The controls in a real helicopter are "proportional", i.e. their effect is
proportional to the displacement from centre. It is not possible to implement
this feature on the joystick since it contains simple on/off microswitches. By
making the effect of each control proportional to how long the joystick is
held, a simple approximation to "real" controls has been achieved, i.e.
momentary operation of the joystick for fine control, and hold to build up a
rapid rate. This does however mean that the joystick must be operated
repeatedly for manoeuvres such as a steady turn or to hold a steady pitch
angle.
Helicopters are naturally unstable and difficult to fly without
autostabilisation. The Apache is fitted with Digital Automatic Stabilisation
Equipment (DASE) making it far easier to fly than most modern helicopters.
Take-off procedure:
1 Ensure that collective indicator is at minimum.
2 Select full throttle - key W - hold pressed until throttle indicator at
maximum.
3 Wait for turbine rpm & rotor rpm to reach 100%.
4 Increase collective pitch by pressing key Q until lift-off occurs. VSI
indicates vertical speed in ft/sec.
5 Reduce collective (key A) to achieve hover i.e. VSI = 0. The helicopter is
now hovering above the helipad.
6 Turning on the spot is accomplished by applying left or right rudder (Z or
X).
Transition to forward flight from hover
1 Increase collective (key Q) to between 80% to 100% Torque. Reduce collective
(key A) if overtorque warning sounds.
2 Tilt nose of helicopter downwards (key up or joystick forward) to between 15
and 30 degrees.
3 Speed will be seen to increase. Autostabilisers will slowly raise the nose of
the helicopter to a level attitude.
4 Reduce collective (key A) to adjust for VSI = 0 ft/sec i.e. not climbing or
descending.
The helicopter will now be cruising at a steady forward speed. The Apache is a
very agile helicopter. From a stable hover, it can reach 100 kts in approx. 6
seconds by pulling 100% torque and tilting the nose downwards to approx. 30
deg.
Straight & Level Flight
Forward speed is related primarily to the torque setting & hence the collective
lever setting, assuming the helicopter is not autorotating (explained later).
Typical speed/torque settings are as follows:
Torque Speed
44% 60 kts
60% 119 kts
75% 147 kts
100% 159 kts
These values will vary slightly with altitude and changes in he1icopter weight
resulting from fuel consumption and weapon release. The Apache is fitted with a
computer-controlled stabilator which enables the helicopter to cruise at any
speed with the fuselage level.
Turning Flight
Providing that the forward speed is greater than 60 kts, turning is achieved by
simply banking left or right. Some vertical lift will be lost when banking and
the helicopter will begin to descend. This may be counteracted by increasing
the collective setting. The helicopter will tend to slow down in a turn unless
the pilot dives to sacrifice height to maintain speed.
At speeds under 60kts, the helicopter will tend to "drift" into the turn, shown
by the sideslip ball at the bottom of the artificial horizon. Turns may be
assisted by applying the rudder, but this will reduce forward speed.
Fluctuations in rotor rpm occur during a turn because of g force effects. The
autothrottle will adjust the turbine rpm accordingly to keep the rotor rpm at
approximately 100%.
Slowing down & returning to the hover
1 Gently raise the nose of the helicopter by pulling back on the joystick
(key down). The aircraft will begin to slow down and also climb. Maintain the
nose-up attitude by repeatedly pulling back on joystick (gently!).
2 Reduce the rate of climb by reducing collective (key A) to keep VSI to
approximately zero. As the forward speed drops below 60 kts, increase
collective (key Q ) to counteract sink rate. Allow nose of helicopter to return
to level flight as speed approaches zero.
3 Adjust collective as required to achieve a VSI of zero. The helicopter should
now be in a stable hover.
4 The helicopter will also slow down when turning, providing that it is not in
a dive. Banking repeatedly left and right is another common method of slowing
down.
5 Providing that the forward speed is less than 60 knots, the pilot may apply
rudder to increase sideslip (sideways drift). The helicopter will slow down
dramatically as a result of the large drag forces generated.
Landing
The helicopter may be landed from the hover (vertical descent) or at forward
speeds of less than 60 kts.
(a) From hover: Lower the collective lever to maintain a steady rate of
descent. Maximum VSI at touchdown = 12 ft/s. Ground cushion effect will be
experienced below 30 ft, resulting in reduction of the descent rate.
(b) Rolling touchdown: With a forward speed of less than 60 kts, gently lower
the collective lever to begin descent. Max VSI at touchdown = 12 ft/s. After
touchdown, the helicopter will slow down and eventually stop. Steer on the
ground by using rudder control.
Taxiing on ground
The helicopter may be taxied on the ground, up to a maximum speed of 60 kts,
providing that the engine/rotor rpm are at 100%. Assuming that the helicopter
is stationary, raise the collective lever to produce about 20% torque. Pushing
forward on the joystick will accelerate the aircraft, and likewise pulling back
will decelerate and eventually stop. Steer by using the rudder.
Refuelling/Rearming/Repairs
By landing or taxiing onto a helipad (not an enemy one!) the aircraft may
refuel, reload with weapons, and be repaired. Once on the pad, close the
throttle to bring turbine & rotor rpm to zero. The helicopter will be serviced
and prepared for the next take-off immediately.
Backward & Sideways Flight
Starting from the hover, the helicopter may be flown backwards by raising the
collective lever and raising the nose to approximately 10 deg. The speed
readout will turn white to denote backward flight. Keep the nose of the
helicopter pitched up to sustain speed. Likewise, the helicopter may be flown
sideways by rolling left or right and raising the collective lever. The speed
readout does not show sideways speed and the pilot must watch the sideslip
indicator on the artificial horizon in order to monitor sideways drift.
Torque Turn
This manoeuvre allows the pilot to perform a 180 deg turn with a dramatic climb
& simultaneous turn.
With a forward speed of 100 kts or more, pull the nose of the aircraft up to
approx 70 deg pitch. Hold this nose-up attitude until the speed drops to approx
60 kts. Release joystick & apply rudder until heading has changed by approx 160
deg. Release rudder, adjust roll to zero if necessary and accelerate with nose
down attitude. During this manoeuvre, the helicopter will roll, pitch & yaw
simultaneously, pulling out on a reciprocal heading.
Aerobatics
The Apache may be flown safely within the following limits: Pitch ± 90 deg
Roll ± 110 deg
Control response may become unpredictable outside these limits i.e. loops &
rolls are NOT recommended!
Autorotation
Autorotation is equivalent to the helicopter "gliding" through the air and is
used when the pilot wishes to descend rapidly or after engine failure. During
autorotation, the rotor blades are being driven by airflow through the rotor
disc as the helicopter descends. This reduces the power required from the
engines and the engine RPM is automatically reduced to maintain 100% rotor
speed and the "split" between turbine rpm & rotor rpm can be seen on the bar
scales. Autorotation is best performed at approximately 60 kts. and above 500
ft. Entry into autorotation is made by gently lowering the collective lever:
(a) Engines active
As the descent rate builds up, the automatic throttle control will be seen to
reduce the turbine rpm. Any fluctuations in rotor rpm will be compensated
automatically by the autothrottle. As the altitude falls to below 200 feet, the
pilot should begin to pull the collective lever up to reduce the rate of
descent, accompanied by raising the nose of the helicopter if he wishes to slow
down. Witn practice, the pilot will co-ordinate increasing the collective and
adjusting the pitch angle in order to slow down to the hover just a few feet
above the ground.
(b) Engine-off landing
In the event of failure of both engines or if the pilot deliberately closes the
throttle in flight, engine rpm will reduce to zero. The pilot must respond
quickly by lowering the collective lever before the rotor blades slow down too
much. Rotor rpm is controlled during the descent by careful adjustment of the
collective lever. Keeping the helicopter level and the speed between 50 & 60
kts, raise the collective lever just before touchdown to bring the rate of
descent to below 12 ft/sec.
Warnings - limits worth noting!
1. The maximum permissible speed of Apache is 197 kts, in a dive. If the speed
should rise above this, the speed readout will go red and the pilot will get an
audible warning. If he continues to increase his speed, the helicopter will
shed a rotor blade at 210 kts, resulting in catastrophic loss of control!
2. If the pilot demands too much power from the engine (overtorque), the torque
readout will be in the red, the engine temperature will rise into the red, and
an audible warning will occur. If this warning is ignored, the engines will
overheat and eventually fail. It is possible to hover and fly on one engine but
flying time is limited if both engines have failed!
HELICOPTER AERODYNAMICS
-----------------------
The following description is intended only as an introduction to the subject.
We recommend the following book for further reading:
"The Helicopter - history, piloting & how it flies" by John Fay, Published by
David & Charles
The rotor blades of a helicopter force air downwards as they pass through the
air. This results in an upward lifting force. The pilot may increase this lift
by "collectively" increasing the "angle of attack" of all the rotor blades and
the helicopter will rise. In order to move forwards, the rotor blades are
tilted forwards, thereby using part of the lift to accelerate the helicopter.
The amount of lift generated by the rotor blades increases with helicopter
speed. This is called translational lift and results in the pilot requiring
less collective as his speed increases. However, as the helicopter continues to
accelerate, this extra lift is offset by the build up of large drag forces
which in turn must be overcome with higher collective settings. This variation
in "operating efficiency" can be visualised as a curve, with its peak at
approximately 60 kts. A helicopter requires much more power for a vertical
climb than it does for the same rate of climb with forward speed. Its hovering
ceiling is much lower than its ceiling with forward speed. Both of these
effects are due to translational lift.
TECHNICAL DATA
Performance:
Maximum speed 197 kts
Maximum cruise speed 162 kts
Maximum vertical rate of climb: 1450ft per min.
Service ceiling 20,000 ft.
Endurance: 1 hr 50 min to 2 hr 30 min, according to weapon load and mission
profile.
Engines: Two General Electric T700-GE-701 turboshaft engines
Each rated at 1695 shp
Weight: Empty: 11,015 lb (4996 kg)
Primary mission gross weight: 14,694 lb (6665 kg)
Maximum take-off weight: 17,650 lb (8006 kg)
Armament:
One Hughes M230A1 chain gun 30 mm automatic cannon with up to 1200 rounds, rate
of fire 750 rnds/min. Four underwing strongpoints to carry up to 16 Rockwell
AGM-114A Hellfire laser-seeking anti-armour missiles or up to 76 2.75 inch
rockets
Dimensions:
Rotor diameter 48 ft, tail rotor diameter 9 ft 2 in
Overall length 58 ft 3 in
Overall height 15 ft 3 in
Crew:
Co-pilot/gunner and pilot in tandem
History:
First flight (YAH 64) 30th September 1975
Entered service with US Army in 1984.
Acknowledgements
Digital Integration would like to thank McDonnell Douglas Helicopters for their
technical assistance during the design of TOMAHAWK. We would also like to thank
the many pilots who kindly assisted in the testing and evaluation of this
product.
All information stated herein is accurate to the best of our knowledge.
Although considerable effort has been given to achieving a realistic
simulation, approximations have been made due to the limitations of the
computer and certain technical data not being available to the public.
SUMMARY OF CONTROLS
Cursor left roll LEFT ( joystick left) N Next objective
Cursor up pitch UP ( joystick back) P Select weapon system
Cursor down pitch DOWN ( joystick forward) Q increase collective
Cursor right roll RIGHT ( joystick right) A decrease collective
Z LEFT rudder W open THROTTLE
X RIGHT rudder S close THROTTLE
C change mode of Doppler M MAP
H Pause
SPACE FIRE button
ESC to Abort mission &
return to menu
INSTRUMENT PANEL NOTATION
[Diagram of instrument panel - see tomahawk_instrumentpanel.jpg]
(C) 1986 DIGITAL INTEGRATION LTD
TOMAHAWK is a trademark of Digital Integration Ltd.
TOMAHAWK is protected by national and international copyright laws. Its
distribution, sale or use are intended for the original purchaser only, on the
specified computer. It may not be transmitted, copied, lent, hired or sold on
any optional buyback basis without the written permission of DIGITAL
INTEGRATION LTD.
LENSLOK INSTRUCTIONS
This quality program is protected by Lenslok.* Please read these instructions
carefully.
Lenslok is a plastic lens which is folded and placed against the television in
order to read a security code. Lenslok is extremely easy to use, and to help
you get familiar with its use, the program contains a tutor mode.
1. A large "H" appears on the screen. Use the symbol shift and space keys to
adjust the H until it is about the same width as the lens holder before it is
folded. When the H is the correct size press the "T" key if you wish to
practise the Lenslok procedure in tutor mode or the "Enter" key for game
entry.
2. Now fold the lens holder into a U shape with the words on the holder "this
side out" on the outside.
3. Hold the lens at arms length in front of the screen with the feet of the
lens holder firmly against the screen and "top" at the top.
4. Close one eye, align the centre line of the lens with the vertical line on
the screen. Holding your head at least 1 ft away from the screen with your eyes
level with the lens, the letters "O" and "K" should appear. If you cannot see
the letters clearly, the letter size can be adjusted slightly using the symbol
shift and space keys. Keep the holder in the same position and press the
"enter" key when OK can be clearly seen.
5. The two character security code, consisting of a combination of numbers,
small or capital letters, has now appeared on the screen. Read the two
characters using Lenslok and enter them on the keyboard. It is not necessary to
distinguish between upper and lower case letters. In tutor mode it will tell
you if the code was correct and in game entry mode the protected program will
run.
6. If, however, you make a mistake (WRONG) or you are too slow (TIME-OUT),
press any key for the next security code. In game entry mode three attempts are
allowed before it is necessary to reload the program.
*Lenslok is a trademark of ASAP Developments Ltd.
CPC-POWER/CPCSOFTS, programmation par Kukulcan © 2007-2024 tous droits réservés.
Reproduction sans autorisation interdite. Tous les titres utilisés appartiennent à leurs propriétaires respectifs.
Hébergement Web, Mail et serveurs de jeux haute performance
Reproduction sans autorisation interdite. Tous les titres utilisés appartiennent à leurs propriétaires respectifs.
Hébergement Web, Mail et serveurs de jeux haute performance